| Caméra visible (en option selon les besoins de l'utilisateur) | Puce CCD | 1/3 pouce avait CCD |
| objectif de la caméra | 30Zoom optique multiple, f = 4,3 mm ~ 129 mm | |
| angle de vue | 59 ° ~ 2,1 ° | |
| Format d'image | Système PAL, fréquence d'images 25 Hz / sortie HD-SDI HD | |
| Caméra HD (facultatif selon les besoins de l'utilisateur) |
pixels | 2400Mégapixels |
| objectif de la caméra | 40~200mm/F4.0~F5.6 | |
| angle visuel | 30,3 °~8,2 ° | |
| Imageur thermique infrarouge non refroidi (facultatif selon les besoins de l'utilisateur) |
Type de détecteur | 7,5~ 13,5 µm non refroidi |
| champ | Double champ de vision : 18 °×13,5 (largeur) ~ 6 °×4,5 ° (étroit) | |
| Format d'image | Réseau PAL/Gigabit | |
| pixels | 640x480 (ou 320x240) | |
| Imageur thermique infrarouge de réfrigération (facultatif selon les besoins de l'utilisateur) |
Type de détecteur | Type de réfrigération 3,7 ~ 4,8 M |
| champ | Double champ de vision : 13,7 °×11 ° (largeur) ~ 2,29 °×1,83 ° (étroit) | |
| Format d'image | Réseau PAL/Gigabit | |
| pixels | 640x480 (ou 320x240) | |
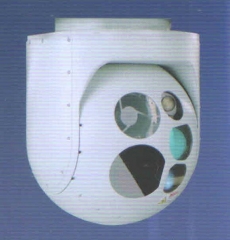
| plate-forme stabilisée | Précision de stabilité | ≤0.3mrad (1σ) |
| Précision de mesure d'angle | ±0.1 °(1σ) | |
| Plage de recherche (azimut) | Nx360 ° | |
| Plage de recherche (pas) | -110 ° à + 20 ° ou personnalisé | |
| Vitesse angulaire maximale du pas | 60 °/s | |
| Vitesse angulaire maximale en azimut | 60 °/s | |
| Accélération angulaire maximale du pas | 100 °/s² | |
| Accélération angulaire maximale en azimut | 100 °/s² | |
| Interface électrique | Sortie vidéo | COPAIN |
| Contrôle des communications | RS422 | |
| Source de courant | Alimentation externe | 18~36VDC |
| Consommation électrique nominale | ≤ 40W, valeur de crête ≤ 80W | |
| état de l'environnement | température de fonctionnement | -30 +60 |
| Température de stockage | -40 +70 | |
| Suivi des images | Contraste de suivi minimum | 5% |
| Vitesse de suivi | 20 °/s | |
| Précision de suivi statique | ≤ 1 pixel | |
| Algorithme de suivi | Corrélation, centre de gravité | |
| poids | 40kg | |
| Taille | ||